


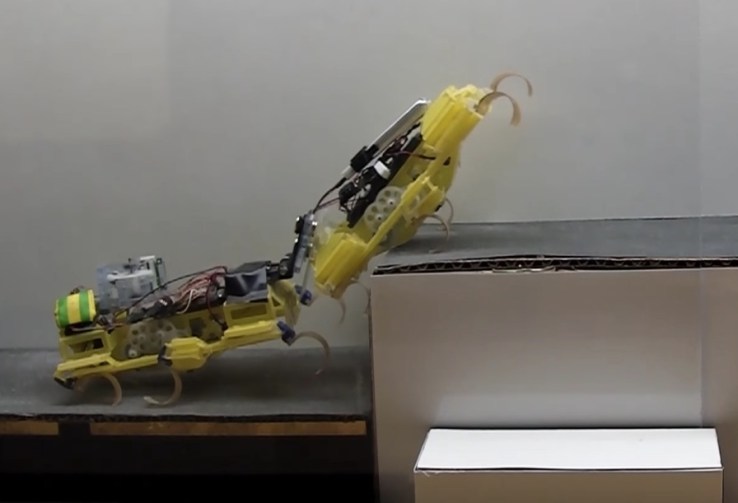
Anything is possible if we all work together — and no one gets left behind. That is the lesson these tiny “VelociRoACH” robots taught me today.
The name stands for velocity robotic autonomous crawling hexapod, which really says it all. They were designed by roboticists at UC Berkeley’s Biomimetics Millisystems Lab, where a number of other nature-inspired machines and materials have also been created.
The tiny insect bots aren’t particularly new, but this cooperative behavior is. Graduate researcher Carlos Casarez was fascinated by the behavior of Australian jumping ants, which work in pairs or more to cover difficult terrain. If ants can do it, why not small hexapodal robots?
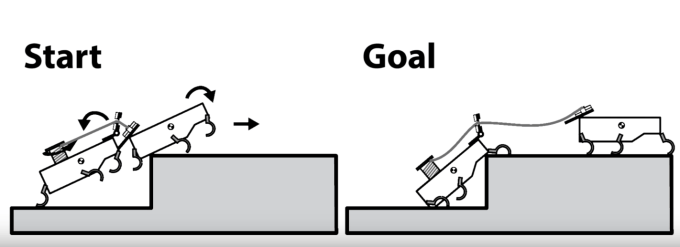
It was decided that two bots should attempt to get over an obstacle bigger than themselves, and which neither could scale on its own. The VelociRoACHes were equipped for the job and a series of “primitives” established.
First, the front bot scrambles up the obstacle, getting its front legs up. The rear bot attaches to the front one with a magnet, then gives it a boost up the step. The front bot then moves forward and the rear bot winches itself up while running frantically. Then it detaches the magnetic tether (with a little kiss) and they’re ready to go again.
You can see it all in the video, and really, the whole process is just about the cutest thing I’ve ever seen robots do. Hell, even the illustrations are cute.
The experiment isn’t just academic, either. Small, cheap robots like these could be deployed by the dozens or hundreds in, say, disaster areas, where techniques like this one (or potentially three or more units working together) could help them navigate rubble and other obstacles. With the right sensors, they could also work together to map out a building or piece of land. And it’s not particularly hard to think of terrifying Terminator-esque applications.
For now, though, the cooperative process is still a little touch and go — the video you see is only the successes from a handful of attempts; each “primitive” fails about half the time because the robots are so basic.
“In the future, we plan to improve the reliability of the cooperative step climbing behavior by adding closed-loop feedback control involving robot-to-robot localization, connection contact sensors, and IMU/motor torque information from each robot,” Casarez told IEEE Spectrum. He also speculated on the possibility of robot chains of 10 or more, or cooperation between ground and air bots — something ETH Zurich is already looking into.
The paper detailing the multi-bot climbing technique will be presented later this month at ICRA 2016 in Stockholm.